In this third article about the new dynamic segmentation plugin, the tool to calibrate routes will be detailed.
This tool allows users to assign kilometer points information to a path that is to geocode road elements from their pk’s.
To proceed to calibration, two information layers are required: the route, obtained with the path creation tool, and a calibration points (pk’s) layer with the route identifier and an attribute that indicates the measurement value.
The tool is enabled when active View contains a linear layer of geometries with M coordinate and a point layer.
When activated, the following dialog where user can enter the required parameters for operation is shown
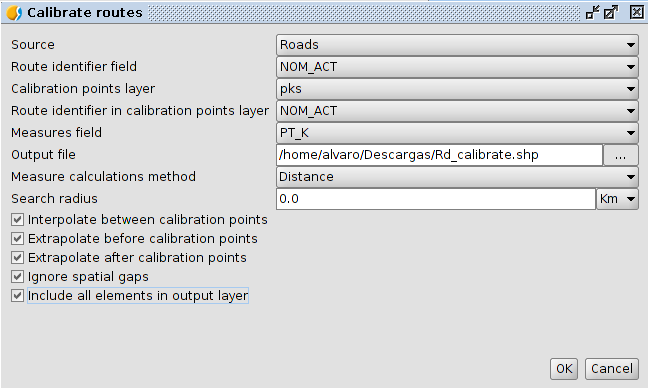
User can define:
- Source: input lines layers list with coordinates M that are loaded in gvSIG will be displayed.
- Route identifier field: the field in the route layer table that contains the route identifier. It displays the list of attributes in the table corresponding to the selected one in “Routes Layer”.
- Calibration points layer: the input calibration points layer. It will list the points tables that are loaded in gvSIG and have a numeric attribute.
- Route identifier in calibration points layer: the field of the calibration points layer table that contains the route identifier. It will show the list of attributes of the table corresponding to the selected “Layer calibration points”.
- From-measure or length field: field in the calibration points layer table that contains the measured values. It displays the attributes list of the table corresponding to the selected one in “Calibration points layer”.
- Output file: the file where the results will be saved.
- Measurement Calculation method: it allows users to choose between Distance (The measurements will be recalculated using the shortest distance between the calibration points through the route to calibrate) and Measurements (The measurements will be recalculated using the existing measurement between calibration points).
- Search radius: the maximum distance where a route calibration point can be located to be included in the calibration calculation. The default value is “0” meaning that points not placed on the path will not be considered for this calibration.
- Interpolate between calibration points: allows to indicate that existing vertices between the calibration points are interpolated to assign M coordinate.
- Extrapolate before calibration points: allows to indicate that existing vertices before calibration points are extrapolated to assign M coordinate.
- Extrapolate after calibration points: allows to indicate that existing vertices after calibration points are extrapolated to assign M coordinate.
- Ignore spatial gaps: allows you to decide whether or not to take into account the holes size that may exist between the route segments. If checked, distance between the last vertex of a section and the first of the next will not be considered; if not checked, the distance between them will affect the calculation of coordinate M of the first vertex (and following ones) the next segment.
- Include all elements in output layer. If selected, the routes not been supplied with calibration points will be included in the output file.
The calibration process can be performed over the entire layer or on the selected routes.
Related posts:
- Dynamic segmentation I: https://blog.gvsig.org/2015/11/24/on-the-road-to-gvsig-2-3-dynamic-segmentation-lrs-i/
- Dynamic segmentation II. Create routes: https://blog.gvsig.org/2016/02/18/on-the-road-to-gvsig-2-3-dynamic-segmentation-ii/





Pingback: On the road to gvSIG 2.3: Dynamic segmentation (III) – GeoNe.ws
Pingback: On the road to gvSIG 2.3: Dynamic segmentation (IV) | gvSIG blog
Pingback: On the road to gvSIG 2.3: Dynamic segmentation (V) | gvSIG blog
Pingback: On the road to gvSIG 2.3: Dynamic segmentation (VI and final) | gvSIG blog
Pingback: gvSIG 2.3 is now available! | gvSIG blog